ცოტა ხნის წინ, JSR-ის ერთ-ერთმა მეგობარმა, კლიენტმა, რობოტ-შედუღების წნევის ავზის პროექტი მოარგა. კლიენტის სამუშაო ნაწილებს სხვადასხვა სპეციფიკაცია აქვთ და შესადუღებელი მრავალი ნაწილია. ავტომატიზირებული ინტეგრირებული გადაწყვეტის დიზაინის შექმნისას აუცილებელია დადასტურდეს, აკეთებს თუ არა მომხმარებელი თანმიმდევრულ შედუღებას თუ წერტილოვან შედუღებას და შემდეგ სრულად იყენებს რობოტს. გასაკეთებელია. ამ პერიოდში აღმოვაჩინე, რომ მას ეჭვები ჰქონდა პოზიციონერის არჩევანთან დაკავშირებით, ამიტომ JSR-მა მოკლედ გააცნო ის ყველას.
ორსადგურიანი ერთღერძიანი თავისა და უკანა კონდახის ვერტიკალური გადაბრუნების პოზიციონერი
VS სამღერძიანი ვერტიკალური გადაბრუნების პოზიციონერი
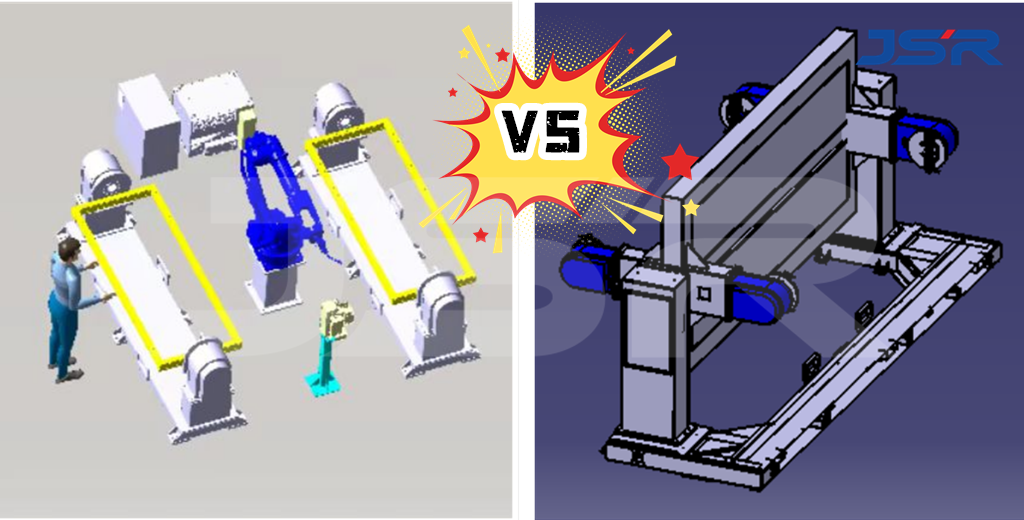
რობოტიზებული შედუღების სამუშაო სადგურში, ორსადგურიანი ერთღერძიანი თავისა და კუდის ვერტიკალური გადაბრუნებადი პოზიციონერი და სამღერძიანი ვერტიკალური გადაბრუნებადი პოზიციონერი ორი გავრცელებული პოზიციონირების მოწყობილობაა და მათ აქვთ საკუთარი უპირატესობები სხვადასხვა გამოყენების სცენარში.
ქვემოთ მოცემულია მათი გამოყენების სცენარები და შედარებები:
ორსადგურიანი ერთღერძიანი თავისა და უკანა ჩარჩოს პოზიციონერი:
ის შესაფერისია იმ სცენარებისთვის, როდესაც შედუღების პროცესის დროს საჭიროა სამუშაო ნაწილის ბრუნვა და პოზიციონირება. მაგალითად, ავტომობილის კორპუსის შედუღების წარმოების ხაზში, ორი სამუშაო ნაწილის ერთდროულად დამონტაჟება შესაძლებელია ორ სადგურზე, ხოლო სამუშაო ნაწილების ბრუნვა და პოზიციონირება შესაძლებელია ერთღერძიანი თავისა და კუდის პოზიციონერის მეშვეობით, რითაც იზრდება წარმოების ეფექტურობა.
https://youtube.com/shorts/JPn-iKsRvj0
სამღერძიანი ვერტიკალური გადაბრუნების პოზიციონერი:
იდეალურია შედუღების რთული სცენარებისთვის, რომლებიც მოითხოვს სამუშაო ნაწილების ბრუნვას და გადაბრუნებას მრავალი მიმართულებით. მაგალითად, აერონავტიკულ ინდუსტრიაში საჭიროა თვითმფრინავის ფიუზელაჟების რთული შედუღება. სამღერძიანი ვერტიკალური გადაბრუნების პოზიციონერი უზრუნველყოფს სამუშაო ნაწილის მრავალღერძიან ბრუნვას და გადაბრუნებას ჰორიზონტალური და ვერტიკალური მიმართულებით, რათა დააკმაყოფილოს შედუღების საჭიროებები სხვადასხვა კუთხით.
https://youtu.be/v065VoPALf8
უპირატესობების შედარება:
ორსადგურიანი ერთღერძიანი თავისა და უკანა ჩარჩოს პოზიციონერი:
- მარტივი სტრუქტურა, მარტივი მართვა და მოვლა.
- წარმოების ეფექტურობის გასაუმჯობესებლად, შესაძლებელია ორი სამუშაო ნაწილის ერთდროულად დამუშავება.
- გამოდგება შედუღების უფრო მარტივი დავალებების შესასრულებლად, მაგალითად, სამუშაო ნაწილებისთვის, რომლებიც ბრუნვის ერთ ღერძს მოითხოვს.
- ფასი უფრო იაფია, ვიდრე სამღერძიანი ვერტიკალური ფლიპ პოზიციონერი.
- შედუღება მარცხენა და მარჯვენა სადგურებს შორის გადართვით ხორციელდება. ერთ სადგურზე შედუღებისას, მუშებს მასალების ჩატვირთვა და გადმოტვირთვა მეორე მხარეს უწევთ.
სამღერძიანი ვერტიკალური გადაბრუნების პოზიციონერი:
- მას შეუძლია მრავალღერძიანი ბრუნვისა და გადაბრუნების განხორციელება და შესაფერისია შედუღების რთული ამოცანების შესასრულებლად.
- რობოტით შედუღების დროს, მუშებს სამუშაო ნაწილების ჩატვირთვა და გადმოტვირთვა მხოლოდ ერთ მხარეს სჭირდებათ.
- უზრუნველყოფს პოზიციონირების მეტ მოქნილობას და სიზუსტეს, რაც შეიძლება დააკმაყოფილოს სხვადასხვა შედუღების კუთხის მოთხოვნები.
- გამოდგება მაღალი შედუღების ხარისხისა და სიზუსტის მოთხოვნების მქონე სამუშაო ნაწილებისთვის.
შეჯამებისთვის, შესაფერისი პოზიციონერის არჩევა დამოკიდებულია შედუღების კონკრეტული დავალების მოთხოვნებზე, მათ შორის ისეთ ფაქტორებზე, როგორიცაა სამუშაო ნაწილის სირთულე, შედუღების კუთხე, წარმოების ეფექტურობა და შედუღების ხარისხის მოთხოვნები.
გამოქვეყნების დრო: 2024 წლის 20 თებერვალი
