JSR'ს რობოტული დამუშავების პროცესის ავტომატიზაცია იასკავა მატარებელი რობოტი გამოიყენება პლასტიკური ნაწილაკების ჩანთების დამუშავებისა და ამოხსნისას, მისი აზუსტი, საიმედო და მდგრადი მართვა, რაც ხელს უწყობს წარმოების ავტომატიზაციის ხელშეწყობას.
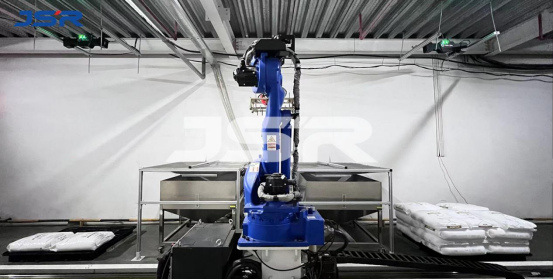
არ აქვს მნიშვნელობა ტექნიკის, სოფლის მეურნეობის, ტანსაცმლის, სამშენებლო თუ ყოველდღიური ცხოვრების ასპექტებს, ჩვენ შეგვიძლია დავინახოთ რეციკლირებული პლასტმასის ნაწილაკების ფიგურა. შეფუთვის შემდეგ, ამ ნაწილაკებს ხელით დამუშავება სჭირდება, რაც წყვეტილი სამუშაოა მაღალი ღირებულებით და მაღალი შრომის ინტენსივობით. მომხმარებლის წინა სამუშაო დრო იყო 8 საათი, ხოლო მასალის თითოეული ტომარა 25 კგ. მექანიკური ეფექტურობა არის 2 ჩანთა წუთში, ხოლო 960 ტომარა შეიძლება დაიშალა დღეში. რობოტის დამუშავებისა და დაშლის შემდეგ სამუშაო დრო არის 24 საათი, რომლის მუშაობაც შესაძლებელია უწყვეტად, ხოლო ეფექტურობა არის 3 ტომარა წუთში, ხოლო დღეში 4320 ჩანთა დაშლაა შესაძლებელი.
Jiesh-ის მიერ განხორციელებული გადაწყვეტილებებიeng მომხმარებლებისთვის: Yaskawa რობოტი GP180, 7,5 მ სიგრძის გრუნტის რელსი, მასალების ურნა, მასალების თარო, GP180 მაქსიმალური დატვირთვა 180 კგ, მკლავის მაქსიმალური სიგრძე 2702 მმ. დედამიწის ორბიტაზე 7,5 მ ეფექტური მოგზაურობაა 6 მ, მოძრაობის სიჩქარე 0,7 მ/წმ. 3D ვიზუალური იდენტიფიკაციის ბლანკის სისტემა. 3D ვიზუალური იდენტიფიკაციის ბლანკის სისტემა, კამერა სასწავლო ფუნქციით, მასალის ადრეული მონაცემების შეძენისა და მოგვიანებით მასალის მოდელირების გზით, ისე, რომ კამერის ამოცნობის წარმატების მაჩვენებელი 99.9% -ს შეადგენს.
ავტომატური წარმოება მნიშვნელოვნად აუმჯობესებს მუშაობის ეფექტურობას, სტაბილურ წარმოების შესაძლებლობებს, ზუსტ მიწოდებას, მაღალ უსაფრთხოებას, არსებული ტერიტორიის გონივრულ გამოყენებას, აუმჯობესებს კორპორატიულ იმიჯს და სახელოსნოს სისუფთავეს, უპილოტო წარმოების მისაღწევად.
გამოქვეყნების დრო: სექ-26-2022
